The most important application for decomposition is in data fitting. The following discussion is mostly presented in terms of different methods of decomposition for linear function.
Introduction
The method of least squares is a standard approach in regression analysis to approximate the solution of overdetermined systems (sets of equations in which there are more equations than unknowns) by minimizing the sum of the squares of the residuals made in the results of every single equation. An matrix decomposition is a way of reducing a matrix into its constituent parts. It’s an approach that can specify more complex matrix operation that can be performed on the decomposed matrx rather than on the origin matrix itself. There are various matrix decomposition methods, such as LU decomposition, QR decomposition, SVD decomposition, and Cholesky decomposition, etc.
LU Decomposition
Least Square: Let
with , , and . We aim to solve where is the least square estimator. The least squares solution for can obtained using different decomposition methods on .
When using LU, we have
Pseudocode
Step 1. Start with three candidate matrices:
where
Step 2. For
Step 3. Inside the first loop, create a second for loop, for
Step 4. Having iterated from
class Decomposition:
"""
References
----------
[1] https://ece.uwaterloo.ca/~dwharder/NumericalAnalysis/04LinearAlgebra/lup/
[2] https://math.unm.edu/~loring/links/linear_s08/LU.pdf
[3] https://johnfoster.pge.utexas.edu/numerical-methods-book/LinearAlgebra_LU.html
"""
def __init__(self):
pass
def plu(self, A):
# Step 1. Inittiate three cadidate matrices
n = A.shape[0]
P = np.identity(n)
L = np.identity(n)
U = A.copy()
PF = np.identity(n)
LF = np.zeros(shape=(n, n))
# Step 2. Loop over rows find the row with the largest entry in absolute
# value on or below the diagonal of the i-th row
for i in range(n-1):
index = np.argmax(abs(U[i:, i]))
index = index + i
if index != i:
P = np.identity(n)
P[[index, i], i:n] = P[[i, index], i:n]
U[[index, i], i:n] = U[[i, index], i:n]
PF = np.dot(P, PF)
LF = np.dot(P, LF)
L = np.identity(n)
# Step 3. Calculate the scalar value
for j in range(i+1, n):
L[j, i] = -(U[j, i] / U[i, i])
LF[j, i] = (U[j, i] / U[i, i])
U = np.dot(L, U)
# Step 4. Add identity matrix onto L
np.fill_diagonal(LF, 1)
return PF, LF, UQR decomposition
In linear algebra, a QR decomposition, also known as a QR factorization or QU factorization is a decomposition of a matrix Gram–Schmidt process, Householder transformations, and Givens rotations.
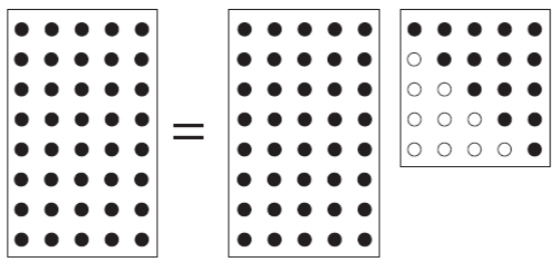
If
where
Before dive into how to calculate QR factorisation, we should know what problem or application we can tackle with or apply for.
- Linear equations
- Generalised linear regression model
- Singular-value decomposition in the Jacobi-Kogbetliantz approach
- Automatic removal of an object from an image
Algorithms for QR
- Gram-Schmidt process
- Complexity is
flops - Not recommended in practice (sensitive to rounding errors)
- Modified Gram-Schmidt process
- Complexity is
flops - Better numerical properties
- Householder transformations
- Complexity is
flops - Represents
as a product of elementary orthogonal matrices - The most widely used algorithm
Gram-Schmidt Process
The goal of Gram-Schmidt process is to calculate orthogonal basis
A full calculation process can be found in this youtube video presented by Dave.
Matlab code
function [Q, R] = gram_schmidt_qr(A)
[m, n] = size(A);
Q = zeros(m, n);
R = zeros(n, n);
for j = 1:n
R(1:j-1, j) = Q(:, 1:j-1)' * A(:, j);
v = A(:, j) - Q(:, 1:j-1) * R(1:j-1, j);
R(j, j) = norm(v);
Q(:, j) = v / R(j, j);
end;Python code
class Decomposition:
def __init__(self):
pass
def gram_schmidt_qr(self, A):
m, n = A.shape
Q = np.zeros(shape=(m, n))
R = np.zeros(shape=(n, n))
for j in range(n):
v = A[:, j]
for i in range(j):
q = Q[:, i]
R[i, j] = q.dot(v)
v = v - R[i, j] * q
Q[:, j] = v / np.linalg.norm(v)
R[j, j] = np.linalg.norm(v)
return Q, RModified Gram-Schmidt Process
In 1966 John Rice showed by experiments that the two different versions of the Gram–Schmidt orthogonalization, classical (CGS) and modified (MGS) have very different properties when executed in finite precision arithmetic. Only for n = 2 are CGS and MGS numerically equivalent.
Instead of computing the vector
where
Matlab code
function [Q, R] = modified_gram_schmidt_qr(A)
[m, n] = size(A);
Q = A;
R = zeros(n);
for k = 1:n
R(k, k) = norm(Q(:, k));
Q(:, k) = Q(:, k) / R(k, k);
R(k, k+1:n) = Q(:,k)' * Q(:, k+1:n);
Q(:, k+1:n) = Q(:, k+1:n) - Q(:, k) * R(k, k+1:n);
endPython code
class Decomposition:
def __init__(self):
pass
def modified_gram_schmidt_qr(self, A):
m, n = A.shape
Q = np.zeros(shape=(m, n))
R = np.zeros(shape=(n, n))
for j in range(0, n):
R[j, j] = np.sqrt(np.dot(A[:, j], A[:, j]))
Q[:, j] = A[:, j] / R[j, j]
for i in range(j+1, n):
R[j, i] = np.dot(Q[:, j], A[:, i])
A[:, i] = A[:, i] - R[j, i] * Q[:, j]
return Q, RHouseholder Transformations
Householder transformations are simple orthogonal transformations corresponding to reflection through a plane. Reflection across the plane orthogonal to a unit normal vector
In particular, if we take
Let us first verify that this works:
and
so
finally
As a byproduct of this calculation, note that we have
where
where
Matlab code
function [Q,R] = householder_qr(A)
[m, n] = size(A);
Q = eye(m);
R = A;
I = eye(n);
for j = 1:n-1
x = R(j:n, j);
v = -sign(x(1)) * norm(x) * eye(n-j+1, 1) - x;
if norm(v) > 0
v = v / norm(v);
P = I;
P(j:n, j:n) = P(j:n, j:n) - 2*v*v';
R = P * R;
Q = Q * P;
end
endPython code
class Decomposition:
"""
https://stackoverflow.com/a/53493770/15048366
"""
def __init__(self):
pass
def householder_vectorised(self, arr):
v = arr / (arr[0] + np.copysign(np.linalg.norm(arr), arr[0]))
v[0] = 1
tau = 2 / (v.T @ v)
return v, tau
def householder_qr(self, A):
m, n = A.shape
Q = np.identity(m)
R = A.copy()
for j in range(0, n):
v, tau = self.householder_vectorised(R[j:, j, np.newaxis])
H = np.identity(m)
H[j:, j:] -= tau * (v @ v.T)
R = H @ R
Q = H @ Q
Q, R = Q[:n].T, np.triu(R[:n])
for i in range(n):
if R[i, i] < 0:
Q[:, i] *= -1
R[i, :] *= -1
return Q, Rif
Full QR factorisation
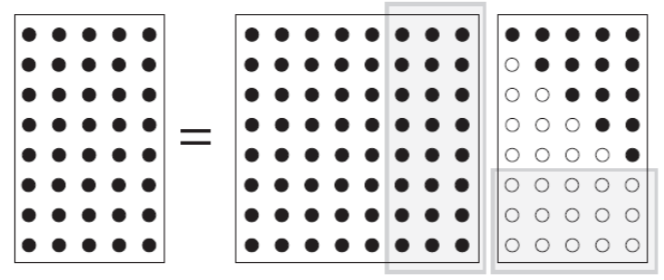
Reduced QR factorisation
Linear Function
After decomposing matrix
using LU decomposition and QR decomposition. Your function should take
Function should include the following:
- Check that
is not a singular matrix, that is, is invertible. - Invert
using different decomposition methods and solve - Return
.
class Decomposition:
def plu(self, A):
n = A.shape[0]
P = np.identity(n)
L = np.identity(n)
U = A.copy()
PF = np.identity(n)
LF = np.zeros(shape=(n, n))
# Loop over rows
for i in range(n-1):
index = np.argmax(abs(U[i:, i]))
index = index + i
if index != i:
P = np.identity(n)
P[[index, i], i:n] = P[[i, index], i:n]
U[[index, i], i:n] = U[[i, index], i:n]
PF = np.dot(P, PF)
LF = np.dot(P, LF)
L = np.identity(n)
for j in range(i+1, n):
L[j, i] = -(U[j, i] / U[i, i])
LF[j, i] = (U[j, i] / U[i, i])
U = np.dot(L, U)
np.fill_diagonal(LF, 1)
return PF, LF, U
def gram_schmidt_qr(self, A):
m, n = A.shape
Q = np.zeros(shape=(m, n), dtype='float64')
R = np.zeros(shape=(n, n), dtype='float64')
for j in range(n):
v = A[:, j]
for i in range(j):
q = Q[:, i]
R[i, j] = q.dot(v)
v = v - R[i, j] * q
Q[:, j] = v / np.linalg.norm(v)
R[j, j] = np.linalg.norm(v)
return Q, R
def modified_gram_schmidt_qr(self, A):
n = A.shape[1]
Q = np.array(A, dtype='float64')
R = np.zeros((n, n), dtype='float64')
for k in range(n):
a_k = Q[:, k]
R[k,k] = np.linalg.norm(a_k)
a_k /= R[k, k]
for i in range(k+1, n):
a_i = Q[:, i]
R[k,i] = np.transpose(a_k) @ a_i
a_i -= R[k, i] * a_k
return Q, R
def householder_vectorised(self, arr):
v = arr / (arr[0] + np.copysign(np.linalg.norm(arr), arr[0]))
v[0] = 1
tau = 2 / (v.T @ v)
return v, tau
def householder_qr(self, A):
m, n = A.shape
Q = np.identity(m)
R = A.copy()
for j in range(0, n):
v, tau = self.householder_vectorised(R[j:, j, np.newaxis])
H = np.identity(m)
H[j:, j:] -= tau * (v @ v.T)
R = H @ R
Q = H @ Q
Q, R = Q[:n].T, np.triu(R[:n])
for i in range(n):
if R[i, i] < 0:
Q[:, i] *= -1
R[i, :] *= -1
return Q, R
def linear_function_solver(A, b, method="LU"):
det = ChioDeterminants().calculate(A)
factoriser = Decomposition()
if det == 0:
print("Matrix is singular!")
return
if method == "LU":
P, L, U = factoriser.plu(A)
z_1 = P.T @ b
z_2 = np.linalg.inv(L) @ z_1
x = np.linalg.inv(U) @ z_2
return x
elif method == "CGS":
Q, R = factoriser.gram_schmidt_qr(A)
x = np.linalg.inv(R) @ Q.T @ b
return x
elif method == "MGS":
Q, R = factoriser.modified_gram_schmidt_qr(A)
x = np.linalg.inv(R) @ Q.T @ b
return x
elif method == "HHT":
Q, R = factoriser.householder_qr(A)
x = np.linalg.inv(R) @ Q.T @ b
return xLet’s check on four different approachs.
A = np.array([
[8, 6, 4, 1],
[1, 4, 5, 1],
[7, 4, 2, 5],
[1, 4, 2, 6]])
b = np.array([20, 12, 23, 19])
print("NP: ", np.linalg.solve(A, b))
print("LU: ", linear_function_solver(A, b, method="LU"))
print("CGS: ", linear_function_solver(A, b, method="CGS"))
print("MGS: ", linear_function_solver(A, b, method="MGS"))
print("HHT: ", linear_function_solver(A, b, method="HHT"))NP: [1. 1. 1. 2.]
LU: [1. 1. 1. 2.]
CGS: [1. 1. 1. 2.]
MGS: [1. 1. 1. 2.]
HHT: [1. 1. 1. 2.]Conclusion
In this article, I implement different matrix decomposition methods, named LU decomposition and QR decomposition (Gram-Schmidt process, Modified Gram-Schmidt process, Householder transformations). In the future, I may apply matrix decomposition algorithm to neural networks. I hope it will be much more efficient than the regularisers methods.
References
- https://ece.uwaterloo.ca/~dwharder/NumericalAnalysis/04LinearAlgebra/lup/
- https://math.unm.edu/~loring/links/linear_s08/LU.pdf
- https://johnfoster.pge.utexas.edu/numerical-methods-book/
- https://web.cs.ucdavis.edu/~bai/publications/andersonbaidongarra92.pdf
- https://deepai.org/machine-learning-glossary-and-terms/qr-decomposition
- https://en.wikipedia.org/wiki/Matrix_decomposition
- http://homepages.math.uic.edu/~jan/mcs507f13/
- https://www.cis.upenn.edu/~cis610/Gram-Schmidt-Bjorck.pdf
- https://wikivisually.com/wiki/Gram%E2%80%93Schmidt_process
- https://rpubs.com/aaronsc32/qr-decomposition-householder
- https://www.cs.cornell.edu/~bindel/class/cs6210-f09/lec18.pdf
- https://homel.vsb.cz/~dom033/predmety/parisLA/05_orthogonalization.pdf
- https://core.ac.uk/download/pdf/82066579.pdf

